

 Recipient site creation with the ARTAS Robot at Bernstein Medical
Recipient site creation with the ARTAS Robot at Bernstein MedicalThe initial use of the ARTAS® Robotic System was the in-vivo separation of follicular units from the surrounding scalp tissue, the first step in a Follicular Unit Extraction (FUE) procedure. Additional steps in FUE include removal of the follicular unit grafts from the donor scalp, recipient site creation, and graft placement. The ARTAS Robot can now perform one more step in this process, making recipient sites.
In performing recipient site creation, the robot automates another part of the hair transplant process that is, in part, repetitive and prone to human error. Observation of the ARTAS System suggests that it performs this function with greater precision and consistency than can be accomplished manually. The robot can create up to 2,000 recipient sites per hour.
How it Works
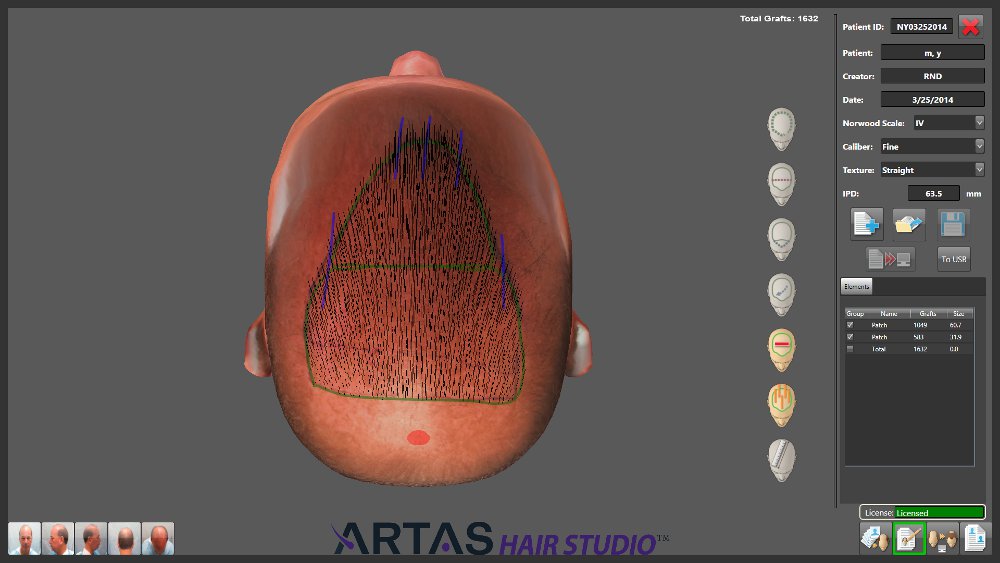 ARTAS Hair Studio showing the hair transplant design
ARTAS Hair Studio showing the hair transplant designFor robotic recipient site creation, the doctor first draws a hairline and other markings directly onto the patient’s scalp to delineate the area to be transplanted. Next, photographs are taken of the patient and, using new software called the ARTAS™ Hair Studio, the images and markings are converted into a 3-D model of the patient. Using the software, the physician specifies the angle of hair elevation, hair direction, site depth, average density, and total number of the recipient site incisions. The site spacing can then be easily modified to create variations in density in different parts of the scalp while the computer keeps the total sites to the pre-selected number.
As with the robotic follicular unit extraction phase, before the procedure begins the patient is administered local anesthetic to the scalp and is seated leaning face down on a pillow.
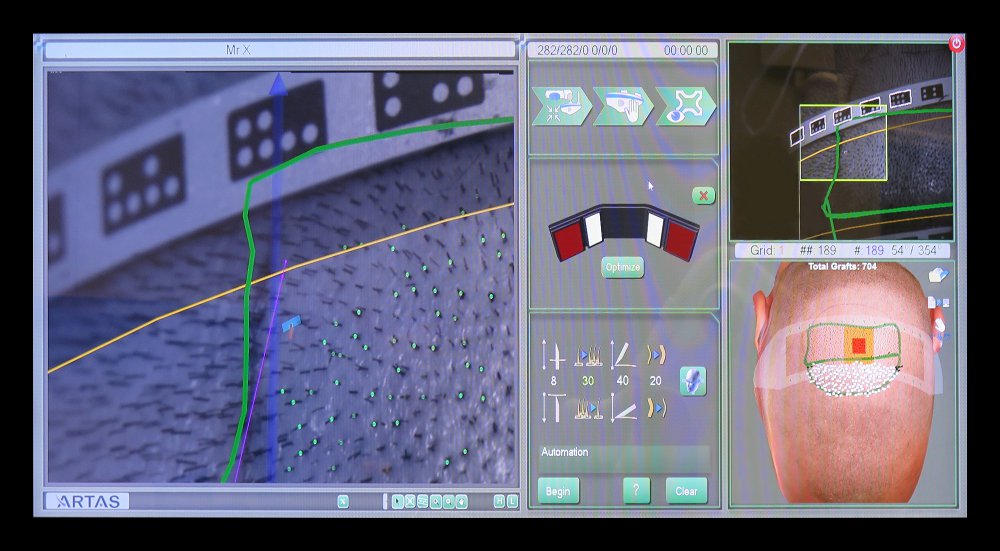 Robotic recipient site creation screen
Robotic recipient site creation screenDuring site creation, the robot automatically uses its image-guided technology to avoid hairs of a certain diameter specified by the doctor. The robot creates sites at a minimum distance from hairs of this diameter and will do so randomly throughout the areas where the hair is finer or the scalp is bald. With this important feature, the new distribution of sites can be made to complement the distribution of any existing hair.
The imaging software is currently used to translate the design the physician makes directly on the patient scalp into a computerized algorithm that directs the creation of recipient sites in the operating room. In the near future, the system will also have the capability of simulating what the actual hair transplant will look like, in advance of the surgery, so that it can be used as tool to aid the physician during the consultation.
Photos of Robotic Site Creation
 Recipient site creation plan
Recipient site creation plan Robotic recipient site creation
Robotic recipient site creation Recipient sites with grafts; 2-days post-op
Recipient sites with grafts; 2-days post-opVideo of Robotic Site Creation
Robotic Recipient Site Creation Benefits and Limitations
As with extraction, the robot eliminates the inconsistencies inherent in creating large numbers of recipient sites by hand. The FUE robot can create sites at a rate of up to 2,000 per hour. Although there is more set-up time compared to sites made manually, once the physician specifies the parameters such as punch depth, punch angle, and site direction, recipient site creation is precise and rapid.
One of the benefits of robotic site creation is that the distribution of grafts over a fixed area of the scalp can be exact. For example, if one wants to transplant 1,000 grafts evenly over a 50cm2 area, this can be done with great precision and with uniform site spacing. In addition, the physician can vary the densities in select regions of the scalp and the robot will adjust the densities in other areas so that the total number of sites remains the same. For example, if one has 2,500 follicular units to cover 120cm2 of scalp and wants to create a density of 25 sites/cm2 in a 40cm2 frontal forelock and use the remaining grafts to cover the other 80cm2 of bald scalp, the robot will automatically calculate a second density of 18.75 sites/cm2 for the remaining area.
Another benefit of the new technology is that the robot can be programmed to avoid existing hair and select which specific hair diameters to avoid. The robot is programmed to keep a specified distance from the existing hair to ensure that the resident follicles will not be damaged and that the distribution of new hair is even and natural. This computerized mechanism appears to be more accurate than what can be done by hand and, importantly, does not sacrifice speed in the process. At this time, the robot is not able to reproduce the crown swirl and, although the robot can be programmed to create a hairline, it is still better for the physician to do this by hand.
In performing recipient site creation, the robot automates another part of the Follicular Unit Extraction hair transplant process that can be prone to human variability and error. In addition, the new technology will soon give the physician a consultation tool to show what the hair restoration procedure can do and to help align the patient’s expectations with anticipated results. Probably the greatest significance of robotic site creation is that it brings the technology one step closer to the goal of a totally automated hair transplant that can be performed with precision, speed and reproducibility.
Introduction at 2014 ARTAS User Group & ISHRS Scientific Meeting
Dr. Bernstein introduced this capability of the robot on February 8th, 2014 at the 2nd Annual ARTAS User Group Meeting and the 22nd Annual Science Meeting of the International Society of Hair Restoration Surgeons (ISHRS) in Kuala Lumpur, Malaysia on October 11th, 2014. He and the Restoration Robotics engineers have used Bernstein Medical – Center for Hair Restoration as an important beta-testing site to enhance and improve the robot’s capabilities. With the addition of recipient site creation to the ARTAS Robotic System, we are one step closer to fully-automated robotic hair transplant.
Dr. Bernstein is a medical consultant to Restoration Robotics, Inc. He has financial interests in the company.





