

- Read More
- Robotic Hair Transplants
In the harvesting step of a manual Follicular Unit Extraction (FUE) procedure, the surgeon visually selects larger follicular units (FU) i.e., those containing two or more hairs, both to maximize hair yield and minimize wounds in the donor area. The ARTAS® Robotic System can now automatically perform this function with speed and precision.
Introduction at 2015 ARTAS User Group Meeting
Dr. Bernstein introduced robotic follicular unit graft selection to the hair restoration industry at the 2015 ARTAS User Group Meeting held by Restoration Robotics, Inc., the company that developed the ARTAS robot. The meeting took place on February 7th, 2015 in Newport Coast, CA.
How Does it Work?
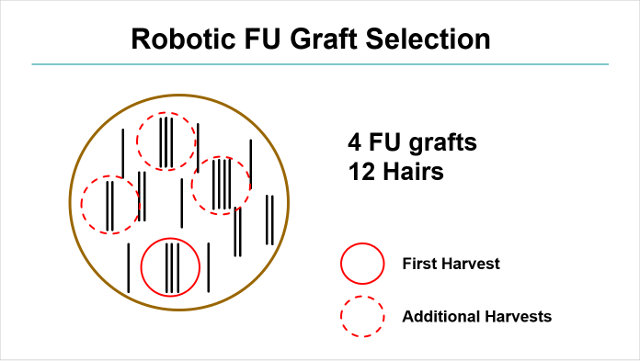
In robotic FU graft selection, the hair restoration surgeon programs the ARTAS FUE Robot to harvest follicular units that contain two or more hairs (by minimizing the one hair units). Using its advanced optical guidance system, the robot orients itself to the scalp using special markings on a tensioner, a plastic frame-like device that places traction on the donor area. Once the robotic arm is in place, each graft is rapidly analyzed, selected for extraction, and then dissected from the surrounding scalp tissue with the robot’s punch tool.
The Importance of Graft Selection in FUE
In Follicular Unit Extraction hair transplant procedures, the surgeon must extract the appropriate number of donor hairs to complete the patient’s hair restoration. Since each follicular unit contains from one to four (or more) hairs, how to extract a distribution of different size follicular units to best arrive at the number needed is an important decision for the surgeon. This decision is guided by two factors: efficiency of extraction and aesthetic considerations.
The surgeon wants to harvest follicular units as efficiently as possible (i.e. more hairs per graft) to obtain the necessary number of grafts while leaving the fewest number of donor area wounds. If governed by efficiency alone, the choice is clear: extract only the largest units. However, in many cases, in order for the transplant to achieve the greatest cosmetic benefit, smaller grafts of 1- or 2-hairs are needed to create a natural-looking, feathered hairline, to restore the temples, or for use in other areas that demand smaller grafts. In selecting which grafts to extract, surgeons need to balance efficiency of extraction (fewer wounds) with the cosmetic utility of varying sizes of follicular units.
ARTAS Robot Graft Selection Capability
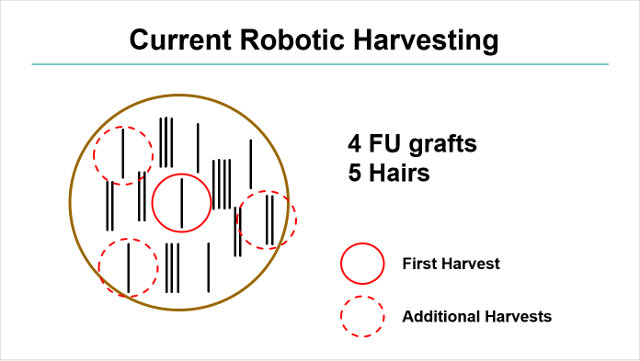
The current iteration of the ARTAS Robotic FUE system selects follicular units irrespective of their hair content. With the new FU graft selection capability, that tries to minimize wounding by selecting only the larger grafts, too few smaller units may be extracted. In this case, the surgeon can either program a second pass to harvest some of the skipped over 1-hair FUs or the team can generate smaller grafts from some of the larger units using stereo-microscopic dissection.
Robotic Graft Selection Pilot Study
A bilateral pilot study of robotic graft selection is on-going at Bernstein Medical to determine the optimal configuration of the ARTAS robot’s new capability. The study looks at robotic harvesting when graft selection is disabled, enabled with one pass at extracting follicular units, and enabled with two passes. In the two pass setting, the robot first extracts only follicular units with two or more hairs, then goes back for a second pass to extract 1-hair grafts that were skipped in the first pass. Harvesting with graft selection disabled was the control for the study.
Results showed that the two pass procedure generated more hairs per graft and more hairs per harvest attempts compared to randomly harvested FU grafts. The clinical benefit (i.e. increase in hairs per harvest attempt) of the two pass procedure over the disable mode was 7.7%. The clinical benefit of the first pass alone over the random mode was 10.6%.
While further data is needed to determine which setting is optimal given a patient’s needs, the pilot study serves as a proof of concept that the ARTAS robot can select grafts so as to increase the efficiency of the harvesting process. The results also highlight the fact that different graft selection settings can be applied to suit a patient’s cosmetic need. For example, if the patient’s primary concern is restoring the frontal hairline, the surgeon can utilize the two pass method to harvest more 1- and 2-hair follicular units. If higher density is needed for the front/top (i.e. forelock area) of the scalp, then the one pass setting can be used to extract the larger 2-, 3- and 4-hair units.
Depending on the patient’s hair restoration needs, the surgeon can further extend the utility of the extracted grafts by splitting larger grafts into smaller ones using stereo-microscopic dissection. To maximize density at the frontal hairline, the surgeon can split 2-hair FUs into two 1-hair units. To maximize coverage over the front and top of the scalp, 4-hair FUs can be split into four 1-hair units or one 1-hair unit and three 3-hair units. With a combination of robotic graft selection and splitting FU grafts, the surgeon can yield the most appropriately sized grafts through the smallest number of harvest attempts and the least donor scarring.
As the technology evolves, the clinical benefit of graft selection, i.e. the amount of hair yielded compared to the number of donor wounds made, should continue to increase.


Automating FUE & Improving the ARTAS Robot
With his work in robotic follicular unit selection, Dr. Bernstein and staff continue to pioneer robotic hair transplant surgery by improving the ARTAS robot’s technical capabilities, making the entire procedure more compelling for patients.
Bernstein Medical is a beta-testing site for the ARTAS FUE robot and the new product feature is an outcome of the research initiated at our facility. We are also the first to offer our patients smaller customized punch sizes. Both of these techniques enhance robotic FUE hair transplants by taking into account the hair characteristics of each individual patient.





